П.А. Алексеев, В.П. Макеев, Б.А. Соснин, Н.Ф. Тамбулов
РЕШЕНИЕ ЗАДАЧ ДИНАМИКИ СТАРТА ПРИ РАЗРАБОТКЕ БАЛЛИСТИЧЕСКИХ РАКЕТ ПОДВОДНЫХ ЛОДОК
Результаты решения задач динамики старта баллистических ракет подводных лодок (БРПЛ) служат основой выбора способа старта, схемы и проектных параметров ракеты, двигательной установки, системы управления, пусковой установки и других элементов ракетного комплекса. Под способом старта далее понимается совокупность технических решений, реализация которых обеспечивает надежный запуск двигателя и безаварийное движение ракеты в пусковой установке, на подводном и начальном воздушном участках траектории. Наиболее простой круг вопросов динамики старта пришлось решать при реализации надводного старта с выдвижной пусковой установки. При этом следовало осуществить лишь безударный выход ракеты из пусковой установки в условиях качки подводной лодки и парировать с помощью системы управления большие начальные угловые возмущения. Такой способ старта был реализован для первых морских ракет. Однако он требовал всплытия лодки для производства стрельбы и сложной, громоздкой пусковой установки, что ограничивало возможности использования ракетного оружия по волнению моря, а также дальнейшее повышение дальности стрельбы при ограниченных габаритах шахты подводной лодки.
Существенное повышение тактико-технических характеристик БРПЛ и расширение условий их боевого использования связано с решением проблемы старта ракеты непосредственно из шахты подводной лодки, движущейся на заданной глубине. Трудности решения этой проблемы вызваны сложностью гидрогазодинамических процессов при запуске двигателя и движении в шахте, которые оказывают значительное воздействие на ракету и пусковую установку, необходимостью преодоления силового воздействия от волнения моря, хода и качки лодки. В силу различных причин на первых отечественных ракетах с подводным стартом был реализован способ старта из затопленной водой шахты с запуском двигателя первой ступени в шахте. В основу практических методов расчёта сопровождающих этот старт гидрогазодинамических и теплообменных процессов положена приближенная математическая модель, в которой основной параметр (эффективная энергоёмкость газов в шахте) определялся эмпирически, в процессе модельных и натурных экспериментов. При разработке первых морских ракет с подводным стартом в определении эффективной энергоёмкости газов допускали, что газы, выходящие из двигателя, охлаждаются мгновенно и что, кроме охлаждения, существуют другие потери энергии (растворимость газов, конденсация паров воды и др.) Эти потери задавались определенным коэффициентом, не зависящим от конструктивных параметров. В последующем по мере накопления знаний о процессах, происходящих при старте, значение эффективной энергоёмкости газов уточнялось путём учёта зависимости её от ряда конструктивных параметров: величины начального газового объёма, секундного расхода газов из двигателя и их состава, гидростатического давления и др. Результаты натурных испытаний ракет показали, что фактическое давление в шахте достаточно хорошо согласуется с расчетным, полученным в соответствии с приближённой математической моделью.
Обеспечение безударного выхода ракеты из пусковой установки достигалось различными путями. В первой отечественной ракете с подводным стартом Р-21 была применена бугельная схема, в которой направление движения осуществляется при помощи двух пар бугелей, движущихся по направляющим шахты. Эта схема обеспечивает незначительные угловые склонения ракеты и перемещения её относительно шахты. Однако для следующих ракет она не нашла применения, так как требовала больших зазоров между ракетой и шахтой. В дальнейшем решение вопросов безударности было достигнуто применением упругих схем направления движения: с помощью поясов резинометаллических амортизаторов, размещённых на ракете, или с помощью поясов резинометаллических амортизаторов, размещённых на шахте, и двух бугелей в хвостовой части ракеты. Последняя схема амортизации и направления движения ракеты обеспечила не только значительное уменьшение кольцевого зазора, но и позволила существенно расширить условия боевого использования морских баллистических ракет по скорости хода подводной лодки и волнению моря.
Важнейшей задачей динамики подводного старта является обеспечение стабилизации ракеты в условиях действия возмущений от хода и качки лодки, а также волнения моря. Развитие морских баллистических ракет постоянно сопровождалось ужесточением условий их стабилизации. Основными факторами, усложняющими стабилизацию морских ракет, являются:
- уменьшение относительного удлинения ракет, что увеличивает их статическую неустойчивость;
- расширение условий использования ракет по скорости хода ПЛ и интенсивности волнения моря;
- уменьшение относительной эффективности управляющих органов;
- увеличение плотности компоновки пусковой установки и ракеты в шахте и, как следствие, появление дополнительных боковых сил от последействия шахтных процессов.
Стабилизация отечественных БРПЛ на участке старта обеспечивается следующими путями:
1) основные управляющие органы задействуются непосредственно после выхода из шахты; для этого предусмотрены датчики выхода, по срабатывании которых начинает работу автомат стабилизации ракеты;
2) в конструкции ракеты или пусковой установки предусматриваются устройства, уменьшающие или компенсирующие силовое воздействие на ракету на подводном участке;
3) увеличиваются диапазоны углов прокачки командных гироскопов системы управления.
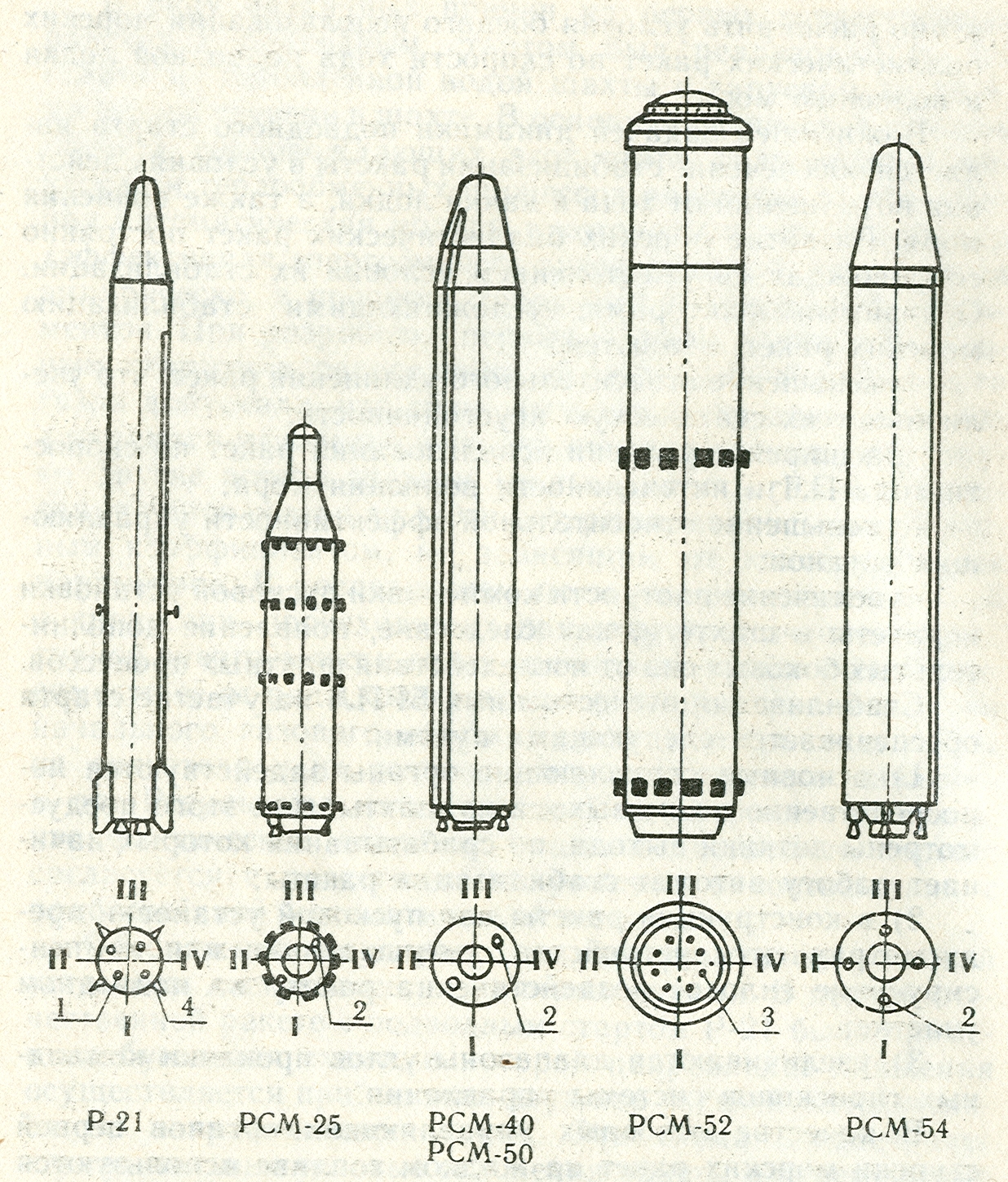
В качестве основных управляющих органов первой ступени морских .ракет на жидком топливе используются поворотные рулевые камеры. Так, на ракете Р-21 (см.рис.) принята четырёхкамерная схема двигателя, причём каждая из камер является как маршевой, так и управляющей. В качестве дополнительного устройства обеспечения стабилизации на этой ракете установлены продольные стабилизаторы, уменьшающие статическую неустойчивость ракеты. Такая конструкция приводила к большим зазорам между ракетой и шахтой, поэтому в дальнейшем не нашла применения. В ракетах РСМ-25, РСМ-40. РСМ-50 в качестве управляющих органов приняты две рулевые камеры, размещённые в кардановых подвесах. Рис. Схемы управляющих органов и дополнительных устройств обеспечения устойчивости на участке старта: 1 - поворотные маршевые камеры; 2- рулевые камеры;3 - клапаны вдува; 4 — стабилизаторы.
В ракетах РСМ-40, РСМ-50 условия стабилизации значительно ухудшились из-за воздействия шахтных процессов. Это воздействие вызвано тем, что после выхода ракеты из шахты повышенное относительно гидростатического давление распространяется и на боковую поверхность хвостовой части ракеты, которая при движении вблизи лодки находится в газоводной среде. При наличии асимметрии в обтекании, вызванной, например, ходом подводной лодки, возникает сила, действующая на боковую поверхность ракеты. Момент и время действия этой силы достигают значительной величины, а направление совпадает с направлением гидродинамических сил от хода лодки. Для исключения последействия шахтных процессов приняты конструктивные меры. В ракете РСМ-54, схема старта которой во многом аналогична схеме старта ракет РСМ-40, РСМ-50, в качестве основных управляющих органов приняты четыре поворотные рулевые камеры, а последействие шахтных процессов устранено путем изменения циклограммы выхода двигателя на режим. Управляющая сила в конструкции морской ракеты РСМ-52 на твердом топливе создается путем вдува горячих газов в закритическую часть сопла.
При надводном старте ракеты для обеспечения непадения отделяемых частей предусмотрена возможность выбора направления увода с пульта управления ракетным оружием, а для снижения теплового и силового воздействий продуктов сгорания двигателя первой ступени на конструкцию подводной лодки запуск его осуществляется на определенной высоте над верхним срезом шахты. Результаты пусков ракеты показали, что выбранная логика полета на участке старта позволяет обеспечить устойчивое движение ракеты и все условия для съема и увода отделяемых на участке старта элементов.
К числу успешно решенных задач динамики подводного старта следует отнести и разработку статистических методов расчета параметров старта. В течение длительного времени расчеты параметров старта, характеризующих устойчивость, безударность и нагружение ракеты, как правило, выполнялись для предельных условий боевого использования, параметров ракеты, двигателя, пусковой установки и автомата стабилизации. Детерминированная схема расчета, позволяя моделировать процесс старта, не полностью выявляет реальные возможности ракетных комплексов. В процессе развития методов расчета подводного старта ракет неоднократно предпринимались попытки вероятностного описания процессов старта в основном аналитическими методами. Их недостаток состоит в том, что они предполагают обязательное существенное упрощение математической модели процессов старта, что приводит к недопустимому ухудшению точности вычислений, поэтому с учетом опыта разработки и мощных возможностей современной вычислительной техники при расчете параметров старта был использован метод статистических испытаний. Поскольку параметры старта не являются независимыми, была разработана. единая математическая модель расчёта параметров движения и нагружения ракеты при старте, позволяющая в каждом конкретном испытании оценить параметры старта и учесть их взаимосвязь при определении вероятности успешного старта. В расчётах использована математическая модель движения подводной лодки в условиях трехмерного нерегулярного волнения и модель волнового поля над стреляющей шахтой. Данные по параметрам качки и волнового поля представляются в виде непрерывных синхронных реализаций и в таком виде используются в статистических расчётах. По результатам расчетов строятся экспериментальные функции распределения критериев успешного старта, которые затем аппроксимируются с помощью статистических рядов. Далее определяется вероятность успешного старта ракеты.
Применение статистических методов расчёта показало достоверность детерминированных схем, позволило обоснованно снизить расчётную интенсивность волнения при проектных расчетах с учетом повторяемости волнения моря и тем самым улучшить характеристики морских ракет при сохранении высокого уровня вероятности успешного старта.
По материалам статей, опубликованных в l975 и 82 гг.